My favorite control project thus far as been a quad-copter control project. The project consisted of three steps. In a first step a state space model for a quad-copter had to be found. After testing the model with some simple simulations, an LQR controller based in this model was designed. Secondly a small weight disturbance was added, which was counteracted by using integrators in the controller. Finally to reach more realistic scenarios Kalman-Filtering was included in the design. The plots below show the results of a simulated test flight:
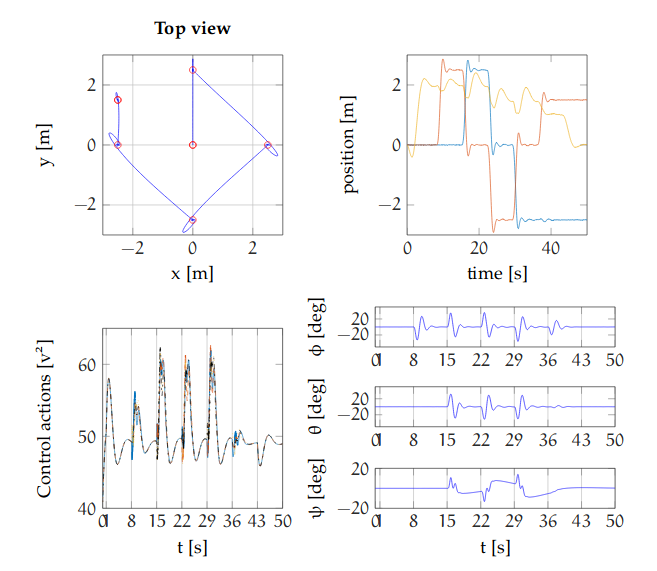
In the top left plot the red circles show checkpoints which the quad-copter had to reach as quickly as possible. The graphs below the position in x,y,z as well as control actions and the evolution of the quadcopter’s angles over time is shown. Overall it can be concluded, that the Simulink-LQR-Controller does its job.
Read more of my work on control:
Project report of my quadcopter control project
Bachelor thesis on pseudospectra in control [in German]